Prior to this, I received my Bachelor's degree with Honors in Computer Science and a minor in Robotics from New York University. I was an undergraduate research assistant at the Generalizable Robotics and AI Lab (GRAIL) under the supervision of Prof. Lerrel Pinto, where I worked on robotic dexterous manipulation.
I was also fortunate to work with Prof. Gizem Kayar on surgical simulation and Prof. Qi Lei on medical image classification.
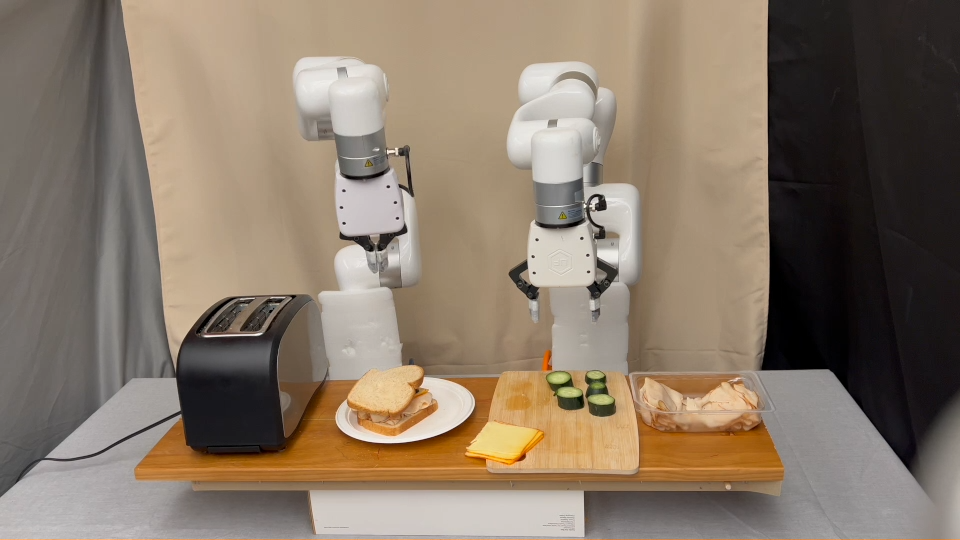
By aggregating natural language corrections from multiple users across multiple tasks into a skillbook, we create and refine a continuously evolving set of generalized skills.
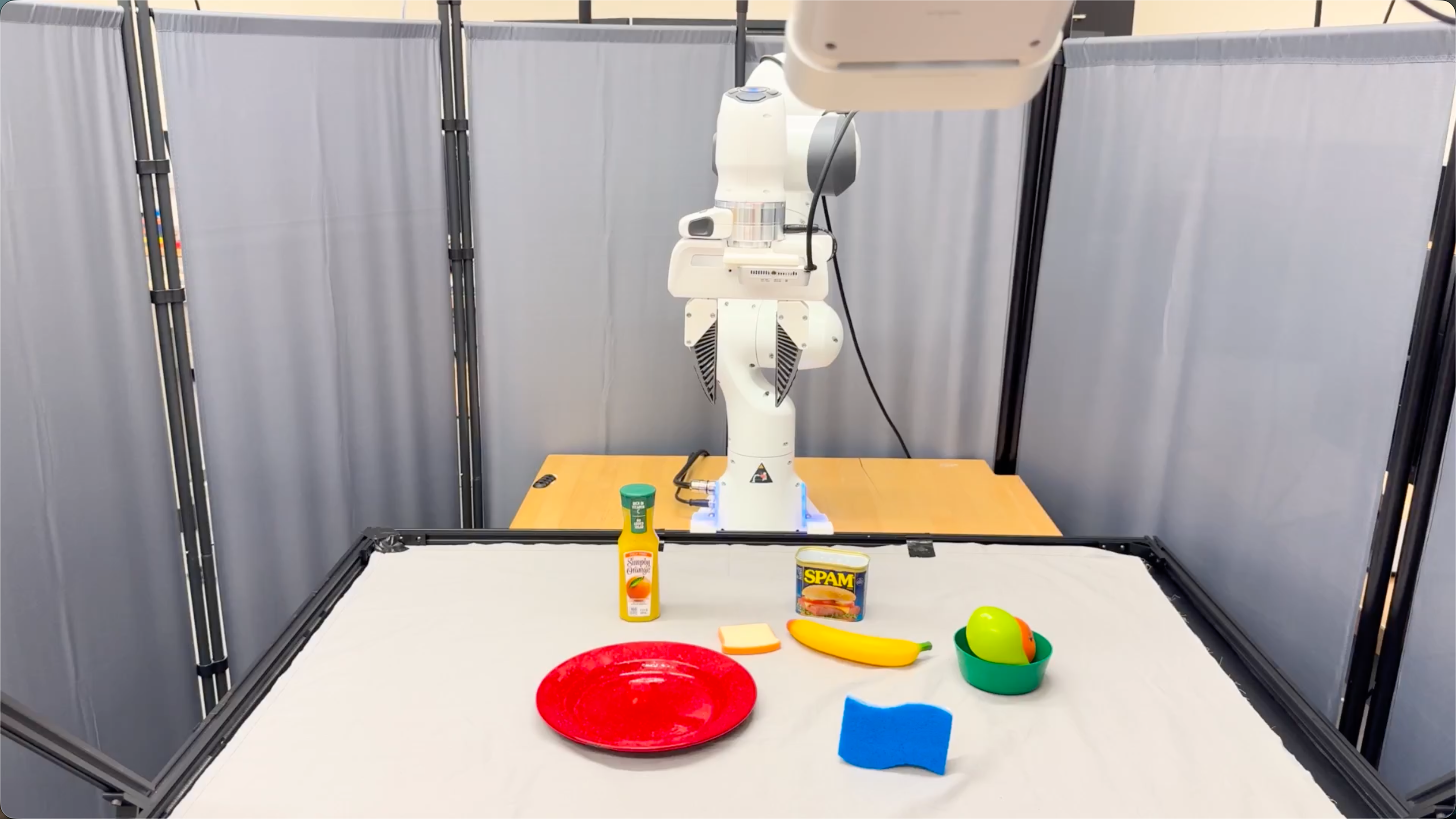
We propose Language Movement Primitives (LMP), a framework that bridges the gap between high-level reasoning and low-level robotic control through the use of Dynamic Movement Primitives.
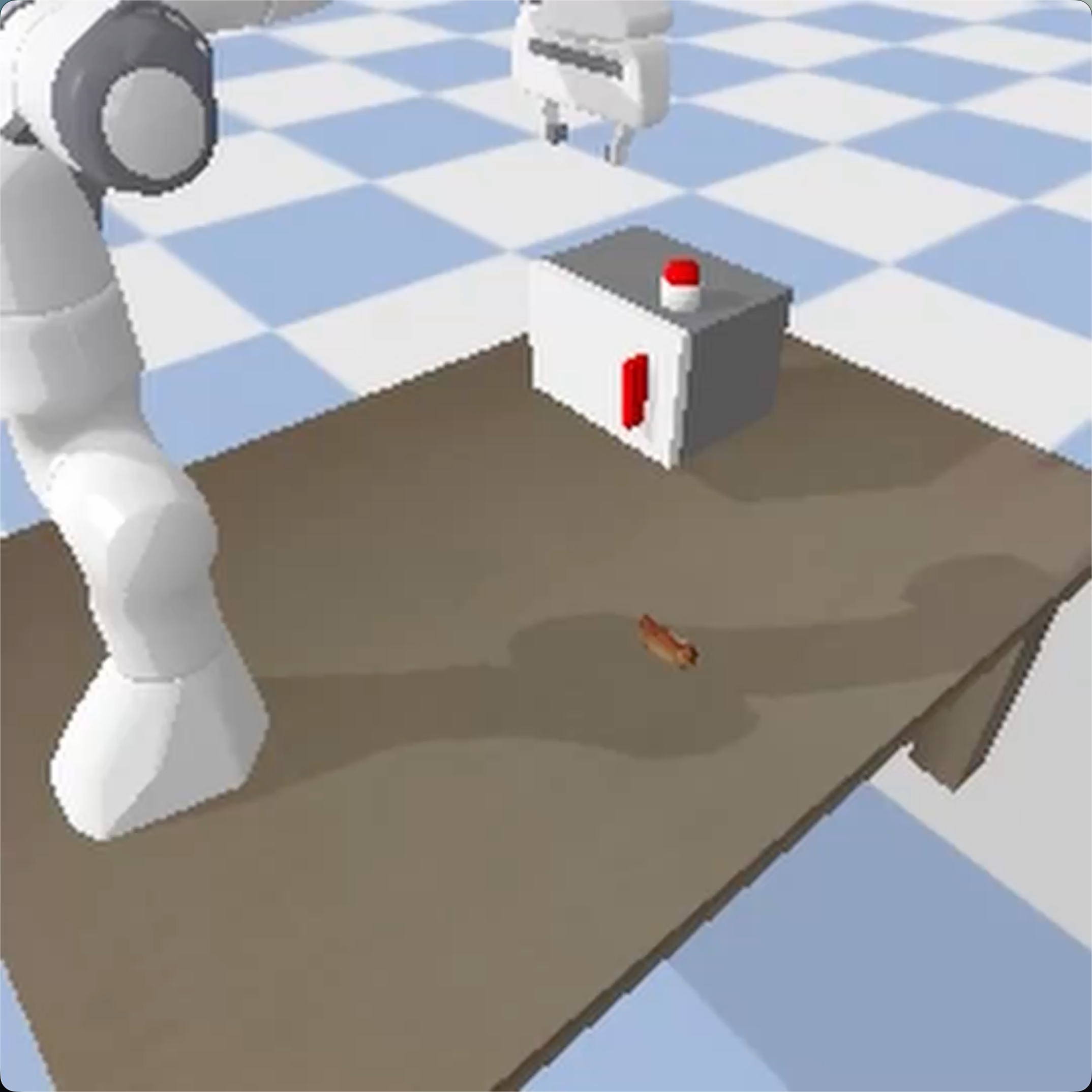
In this work, we present ReSET, a framework that learns to restructure the environment,
bringing diverse start states into a familiar and
manageable distribution before executing the actual task.
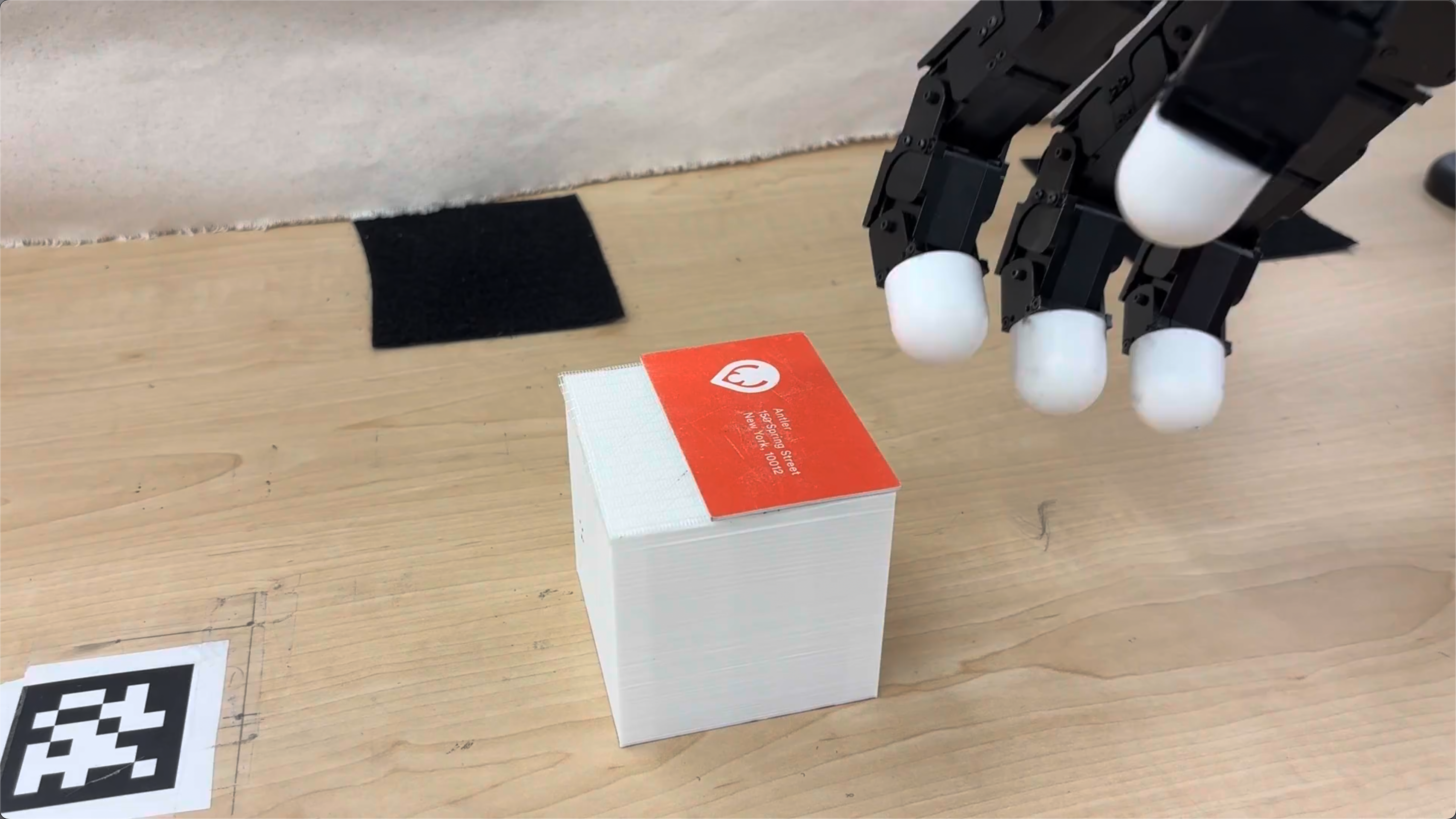
In this work, we present Tactile Adaptation from Visual Incentives (TAVI), a framework that enhances tactile-based dexterity by optimizing dexterous policies using vision-based rewards.
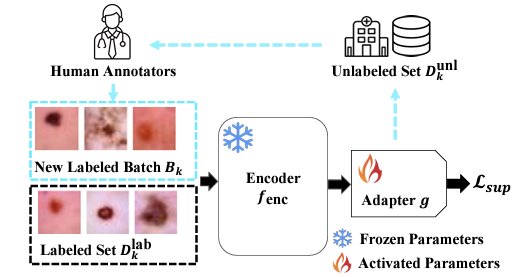
In this work, we intend to learn a "good" feature representation that is both sufficient and minimal, facilitating effective AL for medical image classification.
Reading
Science fiction helps us navigate the future. I found these short stories interesting:




 Reading
Reading